Yeni Robot Konsepti, Suda Yüzmek için Duyarlı Materyaller Kullanıyor
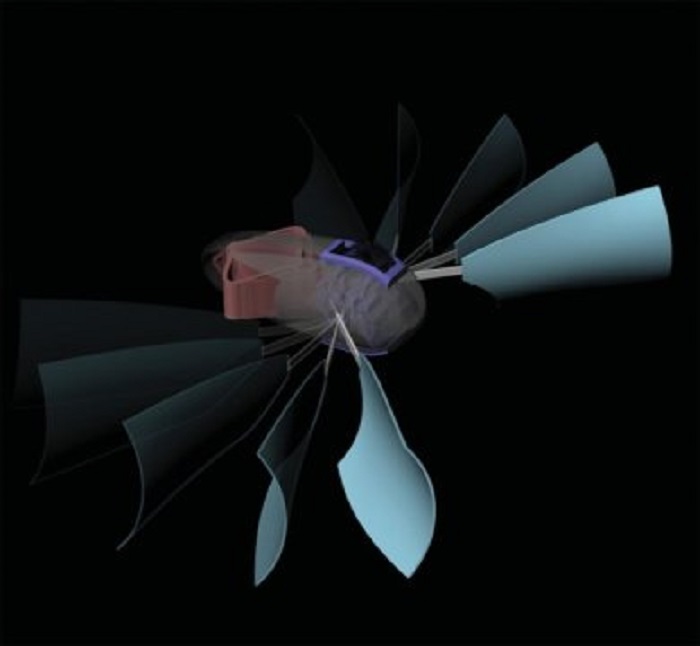
Fotoğraf : Bir sanatçının kendini suda hareket ettirmek için malzeme deformasyonunu kullanan bir robotun yeni tasarımının gösterimi
Caltech ve ETH Zurich’deki mühendisler, herhangi bir motor, servo veya güç kaynağı kullanmadan kendinden itmeli robotlar geliştirdiler. Bunun yerine, bu kendi türünün ilki olan cihazlar, oluşturuldukları malzeme sıcaklık değişimleri ile deforme olurken su boyunca kürek çeker.
Çalışma materyaller ve robotlar arasındaki sınırı bulanıklaştırıyor. Kendinden itmeli cihazlarda, malzemenin kendisi makine işlevini yapar. Caltech Mühendislik ve Uygulamalı Bilim Anabilim Dalı’nda makine mühendisliği ve uygulamalı fizik profesörü ve 15 Mayıs’ta Ulusal Bilimler Akademisi Bildiriler Kitabı’nda ortaya çıkan robotları ilk kez gösteren bir makalenin de yazarı olan Daraio, “Örneklerimiz,robotları kontrol edip ilerletmek için çevresel işaretlere tepki olarak deforme olan yapısal malzemeler kullanabileceğimizi gösteriyor” diyor.
Yeni itme sistemi, soğuduğunda kıvrılan ve sıcak olduğunda dışarı uzanan esnek bir polimerin şeritlerine dayanır. Polimer, robotun gövdesindeki bir anahtarı harekete geçirmek için konumlandırılmıştır, bu da bir sandal gibi ileriye doğru ilerleyen bir kanata bağlanmıştır.
Anahtar, iki ayrı geometride kararlı olabilen bir bileşen olan iki durumlu bir elementten yapılmıştır. Bu durumda, polimer tarafından itildiğinde, bir konumdan diğerine oturan bir elastik malzemeden şeritlerden oluşturulur.
Soğuk robot ılık suya yerleştirildiğinde, polimer dışarı uzanır, anahtarı aktive eder ve ortaya çıkan ani enerji salınımı robotu ileriye doğru çeker. Polimer şeritler aynı zamanda farklı zamanlarda spesifik tepkiler vermek üzere “ayarlanmış” olabilir: yani, daha kalın bir şeridin ısınması, gerilmesi ve son olarak hareket ettirilmesi daha ince bir şeritinkinden daha uzun sürer. Bu ayarlanabilirlik, ekibin farklı hızlarda dönebilen ve hareket edebilen robotları tasarlamasına izin verir.
Araştırma, Caltech’te havacılık profesörü Dennis Kochmann ve Daraio’ın daha önceki çalışmalarına dayanıyor. Sinyalleri iletmek ve bilgisayar benzeri mantık kapıları oluşturmak için iki durumlu element zincirlerini kullandılar.
Tasarımın en son aşamasında, Daraio’nun ekibi ve işbirlikçileri, polimer elementlerini ve anahtarları, dört kanatlı robot kendini ileriye doğru hareket ettirip, küçük bir yükünü bırakıp (bu durumda, üzerine bir Caltech mührü yerleştirilmiş) ve sonra geriye doğru hareket edecek şekilde bağlayabildiler
Caltech doktora sonrası bilim adamı ve PNAS makalesinin ilk yazarlarından Osama R. Bilal, “Basit hareketleri bir araya getirerek, birtakım karmaşık davranışları yürütmek için materyalin içine yerleştirmeyi başardık” diyor. Gelecekte, örneğin pH veya tuzluluk gibi diğer çevresel ipuçlarına cevap veren polimerler kullanılarak daha fazla işlevsellik ve tepki eklenebilir. Araştırmacılar, bu robotların gelecekteki sürümlerinin kimyasal dökülmeler içerebileceğini ya da daha küçük ölçeklerde, ilaç taşıyabileciğini söylüyorlar.
Halihazırda, bu iki durumlu elementler enerjilerini çektiğinde ve serbest bıraktıklarında, tekrar çalışmak için manuel olarak sıfırlanmalıdırlar. İlerde, ekip su sıcaklığı tekrar değiştiğinde kendi kendini sıfırlayabilmeleri için iki durumlu elementleri yeniden tasarlamanın yollarını araştırmayı planlıyor – bu da su sıcaklığında dalgalanma sürdüğü sürece süresiz olarak yüzebilmeleri anlamına geliyor.
Kaynak : sciencedaily.com